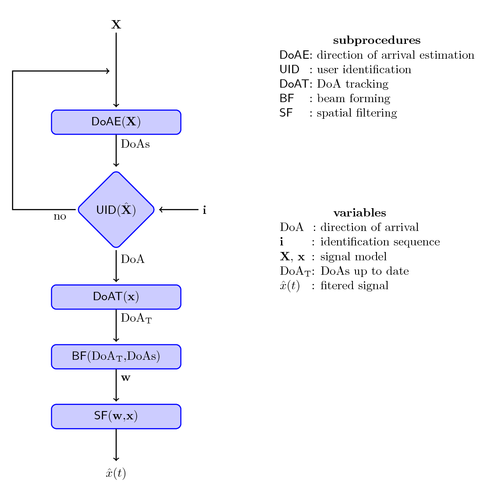
This diagram explains a spatial filter with direction of arrival estimation.
Edit and compile if you like:
% Direction-of-arrival diagram
% Author: Edgar Fuentes
\documentclass{article}
\usepackage{tikz}
\usepackage[active,tightpage]{preview}
\PreviewEnvironment{tikzpicture}
\setlength\PreviewBorder{10pt}%
\usetikzlibrary{shapes.geometric}
\usetikzlibrary{shapes.arrows}
\usepackage{array}
\begin{document}
\begin{tikzpicture} [
auto,
decision/.style = { diamond, draw=blue, thick, fill=blue!20,
text width=5em, text badly centered,
inner sep=1pt, rounded corners },
block/.style = { rectangle, draw=blue, thick,
fill=blue!20, text width=10em, text centered,
rounded corners, minimum height=2em },
line/.style = { draw, thick, ->, shorten >=2pt },
]
% Define nodes in a matrix
\matrix [column sep=5mm, row sep=10mm] {
& \node [text centered] (x) {$\mathbf{X}$}; & \\
& \node (null1) {}; & \\
& \node [block] (doa) {\textsf{DoAE}($\mathbf{X}$)}; & \\
\node(null3){}; & \node [decision] (uiddes)
{\textsf{UID}($\hat{\mathbf{X}}$)};
& \node[text centered](tra){$\mathbf{i}$}; \\
& \node [block] (track) {\textsf{DoAT}($\mathbf{x}$)}; & \\
& \node [block] (pesos)
{\textsf{BF}(DoA$_{\mathrm{T}}$,DoAs)}; & \\
& \node [block] (filtrado)
{\textsf{SF}($\mathbf{w}$,$\mathbf{x}$)}; & \\
& \node [text centered] (xf) {$\hat{x}(t)$ }; & \\
};
% connect all nodes defined above
\begin{scope} [every path/.style=line]
\path (x) -- (doa);
\path (doa) -- node [near start] {DoAs} (uiddes);
\path (tra) -- (uiddes);
\path (uiddes) --++ (-3,0) node [near start] {no} |- (null1);
\path (uiddes) -- node [near start] {DoA} (track);
\path (track) -- node [near start] {DoA$_{\mathrm{T}}$} (pesos);
\path (pesos) -- node [near start] {\textbf{w}} (filtrado);
\path (filtrado) -- (xf);
\end{scope}
%
% legend for subprocedures
\node (leyend) at (7.5, 5){
\begin{tabular}{>{\sffamily}l@{: }l}
\multicolumn{2}{c}{\textbf{subprocedures}} \\
DoAE & direction of arrival estimation \\
UID & user identification \\
DoAT & DoA tracking \\
BF & beam forming \\
SF & spatial filtering
\end{tabular}
};
%
% legend for input and output variables
\node (leyend) at (7, 0){
\begin{tabular}{l@{: }l}
\multicolumn{2}{c}{\textbf{variables}} \\
DoA & direction of arrival \\
$\mathbf{i}$ & identification sequence \\
$\mathbf{X},\,\mathbf{x}$ & signal model \\
DoA$_{\mathrm{T}}$ & DoAs up to date \\
$\hat{x}(t)$ & fitered signal
\end{tabular}
};
\end{tikzpicture}
\end{document}
Click to download: doa-diagram.tex • doa-diagram.pdf
Open in Overleaf: doa-diagram.tex